基于超宽带和惯性传感器融合的室内定位和步态分析系统
UWB and IMU fusion system for indoor positioning and gait analysis
研究表明,多数慢性病与缺乏运动密切相关。因此,准确评估个体的活动量成为一个重要课题,对于健康管理、疾病预防和健康促进具有关键意义。人的活动距离是量化活动量的重要指标。传统上,使用GPS(全球定位系统)或北斗等卫星定位技术来测量移动距离。然而,GPS等技术依赖于卫星信号,因此无法实现室内的准确定位。
超宽带(Ultra-Wide Band, UWB)定位技术因其较高的定位精度、低信号功耗和良好的抗多径效应特性,广泛应用于室内定位、体育运动和智能制造等领域。然而,UWB定位系统在非视距(Non-line of Sight, NLOS)场景中常面临信号被屏蔽或被扰动,导致定位出现较大误差。此外,UWB信号无法用于提供精确的步幅、步频等步态分析参数,限制了其在运动健康领域的应用。
针对这一问题,我们提出了一种利用惯性传感器与UWB信号融合,测量步频和步幅,并通过算法计算人员活动距离的全新系统。在复杂环境中,UWB/IMU的融合定位方法能够利用IMU在环境干扰下的稳健性,修正受复杂环境影响的UWB信号;同时,借助UWB的绝对位置信息消除IMU因随机游走和温度漂移造成的累积误差。我们设计了一个高精度定位算法模型。该模型以误差状态的卡尔曼滤波为基础,通过融合IMU和UWB的测量数据,缓解并修正UWB在非视距环境下的定位误差,从而提高定位精度与稳定性。同时,通过在腰部佩戴IMU,实现了对步态周期、步幅等关键步态参数的计算。这一系统在室内和室外环境下均能获得较为准确的结果。
随着健康管理、智能家居和物联网技术的发展,基于UWB和IMU融合的室内定位与步态分析系统将在多个领域发挥重要作用。其精准的定位与运动监测能力,不仅能提高个人健康管理水平,还能促进各行业的智能化转型,具有广阔的市场前景和应用潜力。
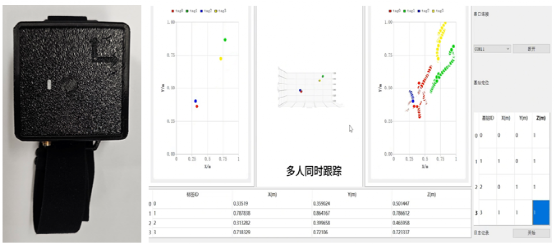
图1 室内定位和分析系统
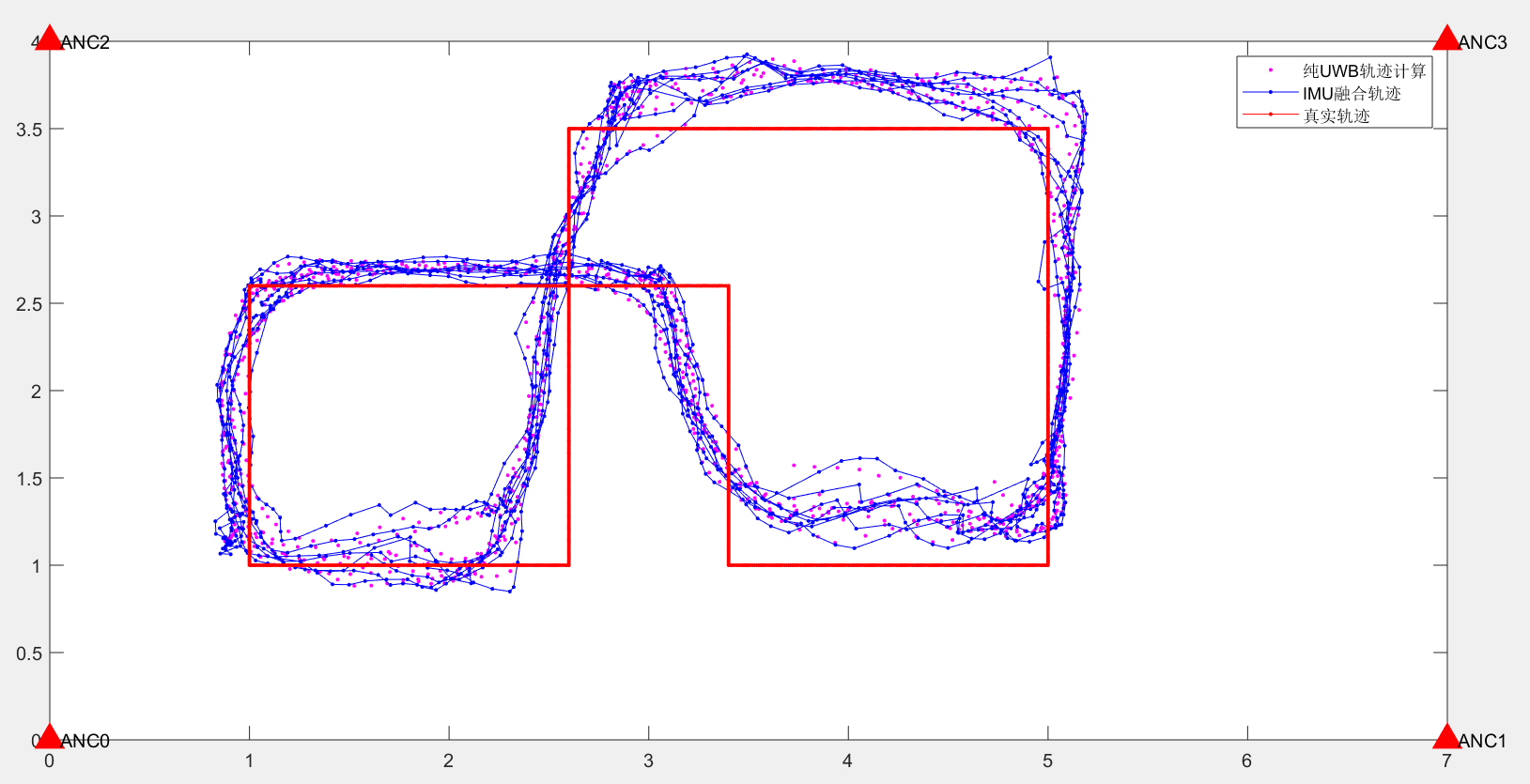
图2 存在障碍物的室内行走场景下的定位效果
成果简介
我们提出了一种利用惯性传感器与UWB信号融合,测量步频和步幅,并通过算法计算人员活动距离的全新系统。在复杂环境中,UWB/IMU的融合定位方法能够利用IMU在环境干扰下的稳健性,修正受复杂环境影响的UWB信号;同时,借助UWB的绝对位置信息消除IMU因随机游走和温度漂移造成的累积误差。我们设计了一个高精度定位算法模型。该模型以误差状态的卡尔曼滤波为基础,通过融合IMU和UWB的测量数据,缓解并修正UWB在非视距环境下的定位误差,从而提高定位精度与稳定性。同时,通过在腰部佩戴IMU,实现了对步态周期、步幅等关键步态参数的计算。这一系统在室内和室外环境下均能获得较为准确的结果。
技术创新
(1)基于QT开发了传感器数据的上位机,通过算法得出位置信息后实时显示出人体的二维和三维定位。
(2)将超宽带传感器和惯性传感器融合,满足室内定位更高精度的要求。
(3)通过IMU获取人体的步态信息,并在此基础上将步态得到的距离信息与超宽带定位进行融合。
专利情况
申请号(授权号):已申请
市场前景及应用领域
随着健康管理、智能家居和物联网技术的发展,基于UWB和IMU融合的室内定位与步态分析系统将在多个领域发挥重要作用。其精准的定位与运动监测能力,不仅能提高个人健康管理水平,还能促进各行业的智能化转型,具有广阔的市场前景和应用潜力。
合作方式:面谈
联系人:技术转化中心
联系方式:26536230



 科研概况
科研概况