地图构建与自主定位导航多用途移动机器人
Mapping and Autonomous Positioning Navigation Multi-purpose Mobile Robot
成果简介(300-500字)
为应对日益复杂和多样化的任务需求,移动机器人正向多功能化和智能化方向演进,迫切需要能够适应复杂场景变化的多用途移动机器人。本作品研制的地图构建与自主定位导航多用途移动机器人,满足多任务需求,提高移动机器人的交互控制能力。
多用途移动机器人系统包括硬件和软件两个方面。在硬件层面,系统以高性能的Nvidia Jetson Orin为主控制器,基于Livox Mid-360激光雷达及其内置的惯性测量单元,使用FAST-LIO(A Fast,Robust LiDAR-inertial Odometry)算法实现了高精度定位与地图构建。设计阿克曼式移动机器人导航框架,采用A*全局路径规划算法以及DWA(Dynamic Window Approach)局部路径规划算法,实现高效的自主导航与自主避障决策功能,解决移动机器人自主控制问题。在软件层面,设计多用途移动机器人管理软件,优化任务分配调度流程,解决移动机器人控制系统的管理效率与用户友好交互问题。同时引入多路光学摄像头和语音播放等多模态交互模块,提升系统的智能人机交互能力。
机器人机械结构图解:

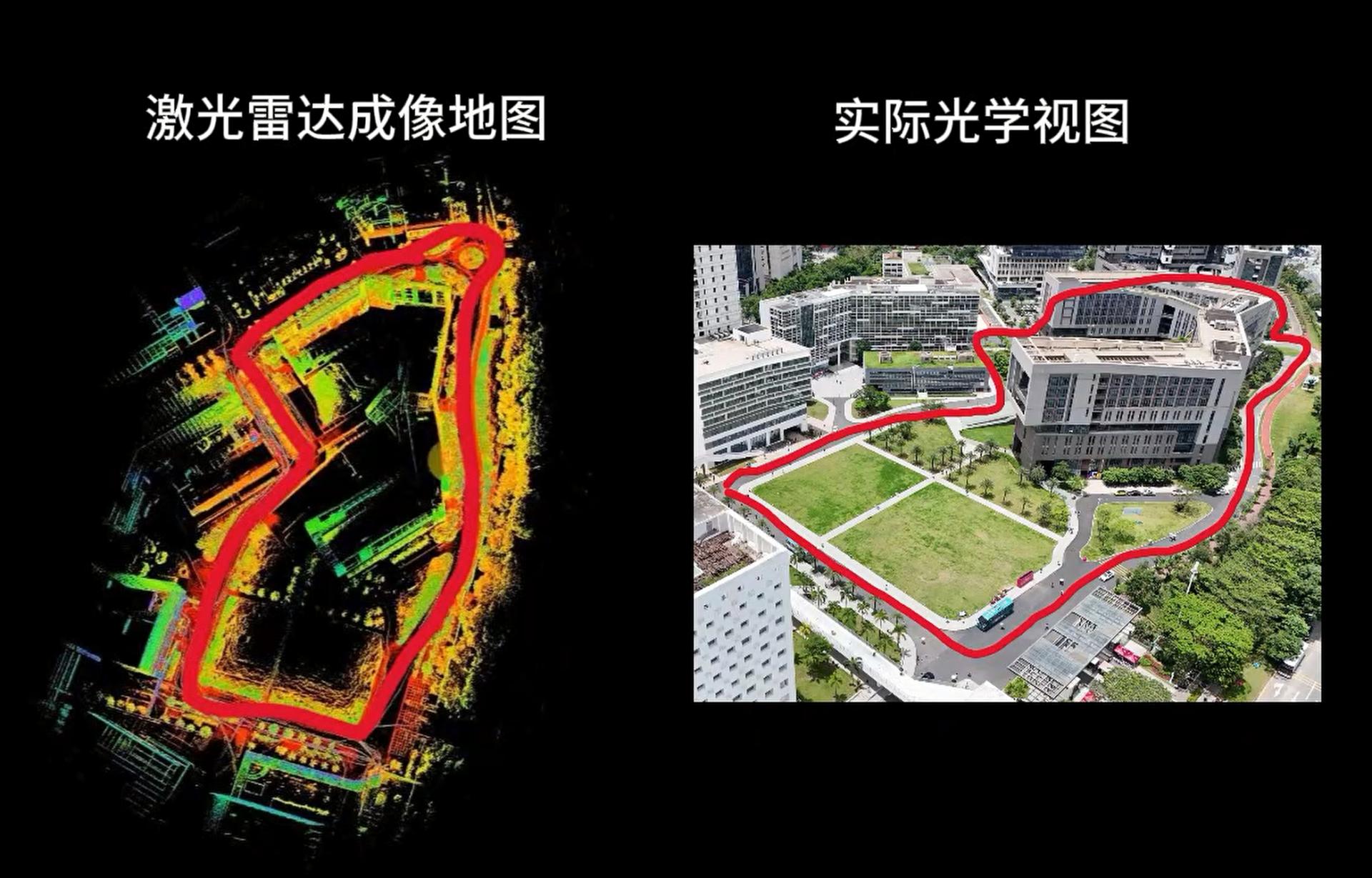
高精度地图构建与定位算法图解:
机器人管理软件与交互系统图解

技术创新
(1)采用高精度地图构建与定位算法。通过对算法的部署应用,实现移动机器人在复杂环境下的精准定位、路径规划和障碍避让。
(2)研制机器人多功能与一体化设计。实现移动机器人自主导航、无人巡检与物资运送等功能模块的高效整合与操作简化。
(3)构建机器人管理软件与交互系统。实现移动机器人的任务分配调度、功能执行与信息交互。
(4)设计基于GD32的辅助功能模块控制板。实现移动机器人的多模态信息交互功能控制,解决机器人友好交互问题。
专利情况
授权号:ZL202311131605.X
李强,钟勋利,黄磊,等.一种基于点云采样和加权融合的目标检测方法及相关设备[P], ZL202311131605.X, 2024-01-09.
市场前景及应用领域
地图构建与自主定位导航多用途移动机器人在未来具有广阔的发展空间和应用潜力。得益于高精度建图算法、多功能与一体化设计以及高效易用的管理软件与交互系统,该机器人将在更多领域中发挥重要作用,其典型应用场景如下:
(1)校园生活服务
通过地图构建与自主定位导航、微信小程序等功能,在校园场景中提供物资运输、校园取件和智能巡检等服务,成为师生生活中不可缺少的帮手。
(2)仓库管理
移动机器人通过构建仓库的复杂场景和处理繁多的仓储任务,可以实现自主导航、识别和运送货物,完成库存管理和货物分拣等工作,从而提高效率和生产率。
(3)服务机器人
在商场、机场、医院等公共场所提供导览、咨询和监控服务,提升服务质量,增加智能化板块设计,与传统相比,减少人力物力的投入成本。
合作方式:技术转让、许可使用、合作开发
联系人:技术转化中心
联系方式:26536230



 科研概况
科研概况